The Flexible Belt (FB) model within the RMOD-K 7.x model family follows a new modelling approach and is not based on the earlier version RMOD-K 6.1. The new model has a fundamentally larger application area than the old version because of the possibility of adapting the model’s topology and other properties to the scope of investigation.
From version 7.10x on the Flexible Belt (FB) is reimplemented in C++, which allows the capability to compute each tire of a vehicle model in parallel mode (SMP).
SUBJECTS OF FURTHER DEVELOPMENTS
While more simplified approaches using the modelling technique of rigid belt dynamics are limited in frequency and disturbance wavelength, approaches using multipurpose finite element codes suffer from very large computational effort in building and assembling stiffness matrix elements regardless to their contribution to the total tyre stiffness. The basic idea behind the RMOD-K 7 flexible belt model is to concentrate on the main effects which are for instance the preload giving tensile stresses in the structure and the kinematics of the belt and sidewall structure. Using the formulation of the finite element method, it is possible to enlarge the field of application by enlarging the catalogue of elements offered to the user: changes in the choice of elements and other meshing operations (as the number of sidewall nodes) allow to adjust the model’s properties according to the current investigation.
Figure 1: belt rebar structure
In the present version, the structure is represented by discrete finite elements based on a master cross section. There are two different rebar elements used in the belt and sidewall area. The main stiffness results from the rebar elements, which are planar elements with a variable number of rebars used inside. The connecting nodes are placed in the belt plane and in the carcass plane of the sidewall. As degrees of freedom, the nodal coordinates are used with respect to a rimfixed base system. Forces from inflation pressure as well as from contact are loading the structure. At the nodes, additional bending ties are used to support the structure and to take the rubber stiffness into account, which may have an interesting influence particularly when looking at some run-flat-tyres.
Because all elements and ties have a nonlinear analytical stiffness description as function of displacement, the system’s stiffness matrix K(q) can be assembled without numeric differentiation procedures and the modal analysis is based on the analytical form of the stiffness matrix. This leads to less computational effort and higher accuracy in the modal analysis than other methods and may be often used in the process of parameter determination and validation. Another feature of this method is the possibility of monitoring the stiffness matrix properties as for instance if it is positive definite or not, which leads to buckling phenomena (used to determine the local structure stability at misuse situation or large cleats for example).
The contact module contains gap sensors on the outer tyre surface. The number of gap sensors can be chosen independently from the structure’s nodes grid while the actual position and velocity of the sensors are calculated using the belt node positions and velocities as boundary conditions.
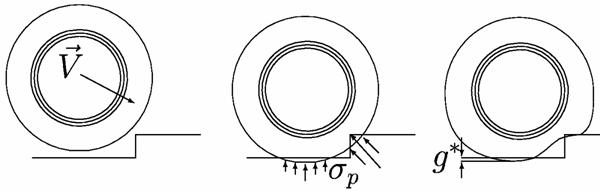
Figure 2: contact stresses and gap - penalty method
The contact algorithm is based on the penalty method, which does not ensure against penetration but is more stable and an order of magnitude faster than corresponding methods using constraints. In the tangential direction, contact forces may result from sticking or sliding which is determined from the friction value, the normal contact force, the sliding velocity and the stick/slip state monitor. The normal force distribution is calculated using the gap sensor information and the tread stiffness.
The tread stiffness in vertical as well as in tangential direction is a nonlinear function of the local load. Tread parameters are the linear modulus, the exponent of the nonlinearity, the stiffness loss parameter in tangential direction due to normal load, the tread geometry parameters influencing the steady state tyre behaviour in longitudinal and lateral direction and the number of sensor points in both directions. Additional, the friction value as function of sliding velocity and normal stress distribution in the contact is input to the model.
Back to TOP
The model’s parameters can be divided into three sets:
- geometry describing the mesh and additional information like mass distribution,
- stiffness parameters of the structure and the tread and
- friction parameter as for instance the dependency on the normal stress and velocity.
Additional data is used to describe the maneuver to be calculated and the amount of output data. All information needed to run a simulation is concentrated in one input file which makes the connection to external tools more easy.
Parameter determination of the model is based on geometric information as belt radius and tread thickness and a set of measurements including steady state force and moments, modal properties and cleat tests. These tests are taken to parameter determination purposes as well as for validation of the model.
To support this process, a new preprocessor with a graphical user interface (GUI) has been developed, from which some standard maneuvers as for instance calculation of steady state tyre behaviour and cleat tests on a drum surface can be carried out. With the design of experiments functionality, sensitivity analysis concerning a set of parameters with respect to a certain maneuver is very easy to perform.
The postprocessor gives some insights into the mechanics of the structure and the contact:
- animation of the results from a modal analysis of the unloaded but inflated tyre with fixed rim or at any situation of a rolling loaded tyre,
- animation of the structure dynamics in the time domain and
- footprint dynamics with components or magnitude of velocities or stresses in the contact points
are some of the main features. These results can be taken from a run of the model with the internal testrigg or from runs with commercial mbs systems. Additional information of a run may be taken from auxiliary output to evaluate the local relative deformation of the structure or other information of interest.
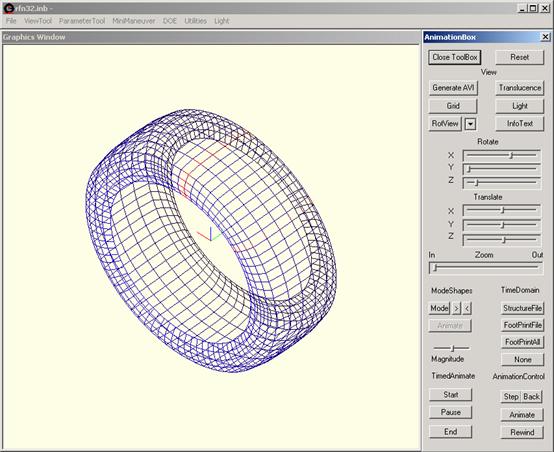
Figure 3: GUI FlexView
The first example shows the comparsion between measurement and simulation of lateral force and longitudinal force for a typical passenger car tyre at different wheel loads. In the simulations, a drum surface with a radius of one meter has been used according to the measurement situation.
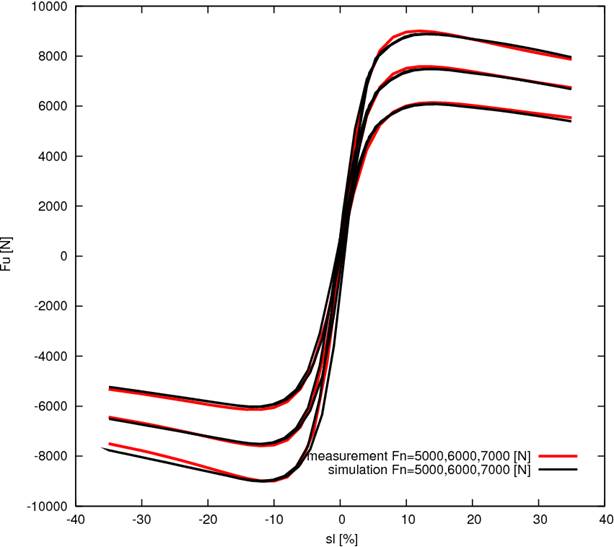
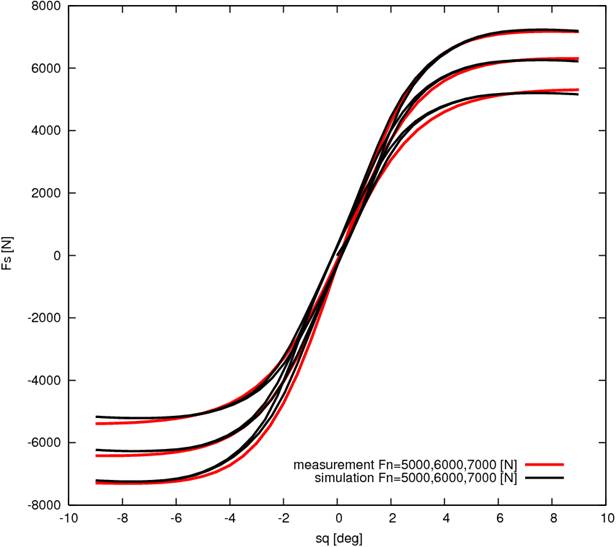
Figure 4: comparsion between measurement and simulation (longitudinal and lateral force)
The so called Force and Moments are heavily influenced by the friction properties of the contact partners. The friction function in RMOD-K 7 FB is a function of the sliding velocita and the normal stress. This function can be modified to simulate the influence of particular road properties. To get some ideas about the ranges of interest concering velocity and stress, the values of velocity and stress in each contact point are recorded during a simulation. This information can be displayed as surface together with the input function μ (v, σ). In the examplein Figure 5, the colored surface is the histogram while the grid lines show the input. Any changes in the input function μ (v, σ) outside green or blue areas of the histogram surface will not change the simulation results.
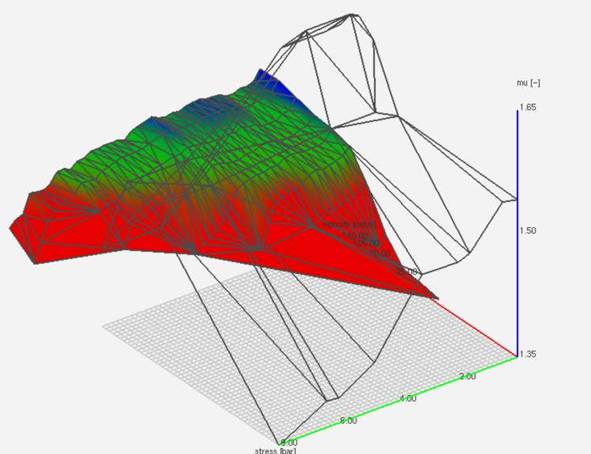
Figure 5: friction editor and surface of histrogram information about sliding velocity and normal stress
In the next example, results of a cleat test are shown, again as comparison between measurement and simulation. Also at cleat test, drum diameter and friction properties of the measurement are taken into account if known. In the measurement, effects from nonuniformities are visible, which are not included in the simulation. When crossing the cleat straight ahead, a reduced number of degrees of freedom compared with the case shown in Figure 3 will also lead to sufficient results.
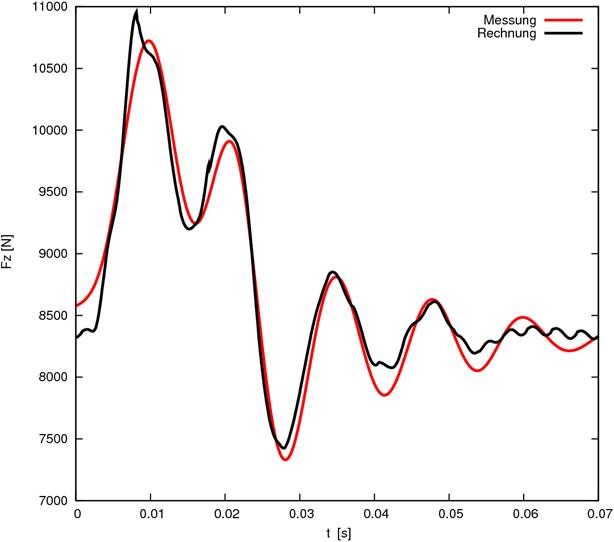
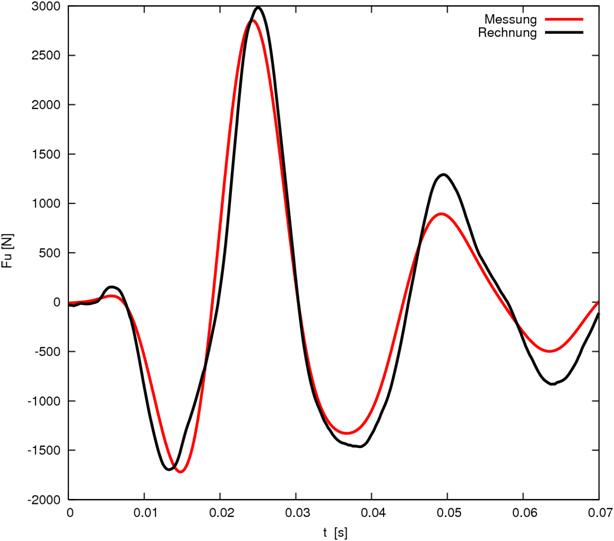
Figure 6: comparsion between measurement and simulation (vertical and longitudinal force)
A typical number is about 700-900 degrees of freedom for cleat test simulations.While extending the cleat height and shape up to misuse maneuvers, large deformations as shown in the last example occur. In the figure, the distribution of contact forces as well as the normal stress distribution in the structure can be seen. The gap between the belt structure and the ground is filled by the tread. Due to the nonlinear contact of this layer and the nonlinear structure representation, effects like buckling of the structure are represented within the simulation.
Figure 7: direction of contact forces at large pothole obstacle
Such inputs leads to the need of double sided contact elements in the sidewall of the model and consideration of elastic or even plastic properties of the rim. These requirements are subject to the further development like others described below. As in the past, development of the RMOD-K models is user driven in choice and priority.
Back to TOP
Subjects of further developments:
Some topics of further development or implementation are
- extension to misuse maneuvers including effects of the rim (elastic/plastic behaviour),
- new finite element substructure formulation concerning substructures of low density,
- additional elements in the element catalogue and new nonlinear materials,
- constitutive contact approach including thermal effects and wear,
- modal based calculation in time and frequency domain.
While some of these topics like the constitutive contact approach are in a research status, others like the extension to misuse are worked on presently. The new finite element substructure formulation and the modal based calculation will give rise to shorter computational time while additional elements or constitutive contact approach while enlarge the fields of application.
Back to TOP